Jannik Zürn
Senior Machine Learning Engineer @ Parallel Domain

My name is Jannik Zürn. I am a Senior Machine Learning Engineer at Parallel Domain.
I am an AI engineer and scientist passionate about the intersection of robotics and simulation. My work focuses on building the sophisticated simulation environments and generative models necessary for the next generation of autonomous systems.
Experience
- Parallel Domain — Currently focusing on 3D Gaussian Splatting (3DGS) and diffusion models to create high-fidelity synthetic environments for AI training.
- Wayve — Previously worked within the Neural Simulation team, developing AI-driven world models to accelerate autonomous driving development.
Background
I hold a degree in Mechanical Engineering from the Karlsruhe Institute of Technology (KIT), specializing in Computational Mechanics and Robotics. My early career included software and research internships at ANSYS (CFD for internal combustion) and the social robotics startup Mayfield Robotics. I completed a PhD in robotics and AI at the University of Freiburg, where I focused on self-supervised learning for urban navigation.
Research Interests
My research bridges the gap between Robotics and Deep Learning to enable robust autonomous urban navigation. I am particularly interested in multi-modal, self-supervised learning, which allows robots to interpret complex environments without the need for expensive, manual data labeling.
- Neural Simulation: Building photorealistic, controllable 3D environments with Gaussian Splatting and generative models.
- Robust Perception: Developing systems that remain accurate under adversarial conditions, including sensor noise, uncertainty, and occlusions.
- Scalable AI: Using self-supervision to bypass the "labeling bottleneck," making the transition from simulation to real-world deployment more efficient.
- Sensor Fusion: Leveraging diverse sensor modalities to build a more holistic and resilient understanding of dynamic urban environments.
You can find a complete list of my works on Google Scholar and my CV here.
News
- Jun 2025 I joined Parallel Domain as a Senior Machine Learning Engineer, working on 3D Gaussian Splatting and generative models for high-fidelity synthetic environments!
- Jul 2024 We released WayveScenes101, a dataset and benchmark for novel view synthesis in autonomous driving — 101 diverse driving scenes with over 100k images!
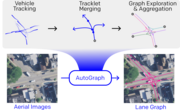
- Nov 2023 🎉 Our paper AutoGraph: Predicting Lane Graphs from Traffic Observations was accepted to Robotics and Automation Letters (RA-L) and was presented at ICRA 2024 in Yokohama!
- Feb 2023 🎉 Our paper Learning and Aggregating Lane Graphs for Urban Automated Driving was accepted at CVPR 2023 — Vancouver, Canada! 🍁
- Dec 2022 I had the pleasure to present our paper TrackletMapper: Ground Surface Segmentation and Mapping from Traffic Participant Trajectories at CoRL 2022 in Auckland, New Zealand! 🥝
Selected Publications

@article{zurn2024wayvescenes101,
year = {2024},
journal = {arXiv preprint arXiv:2407.08280},
author = {Zürn, Jannik and Gladkov, Paul and Dudas, Sofı́a and Cotter, Fergal and Toteva, Sofi and Shotton, Jamie and Simaiaki, Vasiliki and Mohan, Nikhil},
title = {WayveScenes101: A Dataset and Benchmark for Novel View Synthesis in Autonomous Driving},
}
@article{zuern2024autograph,
publisher = {IEEE},
year = {2024},
pages = {73--80},
number = {1},
volume = {9},
journal = {IEEE Robotics and Automation Letters},
author = {Zürn, Jannik and Posner, Ingmar and Burgard, Wolfram},
title = {AutoGraph: Predicting Lane Graphs from Traffic Observations},
}
@inproceedings{buchner2023learning,
year = {2023},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
author = {Büchner, Martin and Zürn, Jannik and Todoran, Ion-George and Valada, Abhinav and Burgard, Wolfram},
title = {Learning and Aggregating Lane Graphs for Urban Automated Driving},
}
@inproceedings{zurn2022trackletmapper,
year = {2022},
booktitle = {Conference on Robot Learning (CoRL)},
author = {Zürn, Jannik and Weber, Sebastian and Burgard, Wolfram},
title = {TrackletMapper: Ground Surface Segmentation and Mapping from Traffic Participant Trajectories},
}